
WhereAble
A haptic belt and wearable system for deaf/hard-of-hearing people that determines sound direction and alerts them to important sounds.
ROLE
Creative technologist
WHEN
09.2023 - 04.2024
METHODS + TOOLS
Electronics/hardware
•
Raspberry Pi
•
Arduino
•
Electronic Textiles
•
Soft Goods
•
Haptics
•
UX research (interviews)
•
Usability Testing
User Research & Problem Definition
What problems aren’t currently addressed with hearing-amplification devices?
I ran semi-structured interviews with a range of folks who have hearing loss. Each interview covered three areas: daily life with hearing loss, current tech and workarounds, and larger structural barriers.
Example interviewees:
E’s hearing loss is asymmetrical and fluctuating.

As a result, they get limited benefit from hearing aids.
M is a disability activist whose partner is culturally Deaf

They do not use hearing aids or cochlear implants.
User Research Insights
Constant scanning to compensate for reduced sound localization is exhausting and insufficient.

Multimodal feedback (e.g., sound AND visual) is more inclusive of other disabilities.

Concerns about visibility, comfort, and assistive device stigma.

Concerns about nuisance alerts. Device needs to classify sounds and only alert when a threshold is reached.

Feedback must be immediate & intuitive

Preference for embedded wearables (watch, armband) or smartphone.


this impacted our approach to signals processing!
Concepting
How might we indicate sound direction to users to maximize their situational awareness?
Indication Method

User must look at device constantly
Visual only
Haptic only

Only alerts when needed
Faster

Haptic + visual
Multi-step process
Only alerts when needed
Physical Form Factor
Option
Indication Method
Verdict
Watch
Haptic alert + visual direction

Discreet. Easy to read. Difficult to communicate with watch OS.

Ring
Haptic only

Very discreet. Difficult to prototype and to read.

Belt
Haptic only

Less discreet unless worn under clothes. Easiest to prototype. Likely easiest to read.

Bracelet/armband
Haptic only

Discreet. Easy to prototype. May be more difficult to read.

Phone
Haptic alert + visual direction
Visual only

Easy to carry around.
Slow; must unlock phone and open app.

Glasses
Visual only

Very distracting. Difficult to prototype. Extremely visible.


We decided to start with a haptic band.
Prototyping
How do we create a comfortable wearable?
Iteration 1: leather belt & wires
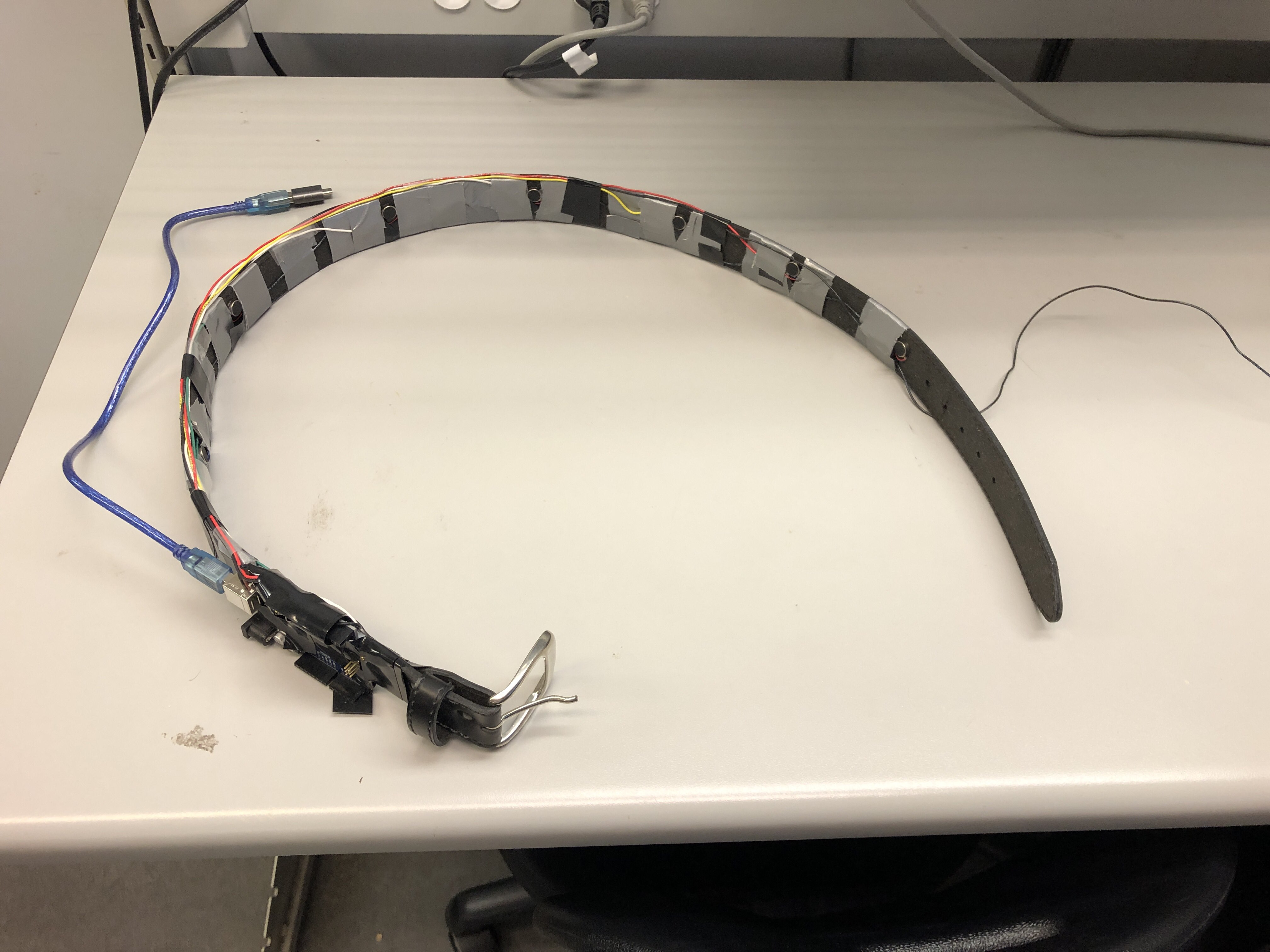
The results among 6 participants were poor:
57% correct
4.6s reaction time
loose → haptic motors need to be tight to body
bulky → uncomfortable
stiff → entire belt vibrated
We needed a new form factor that...
- ensures all motors contact the body
- isolates the vibrations
- fits different bodies
- is lightweight, low-profile, and comfortable
Iteration 2: Electronic Textile Prototyping
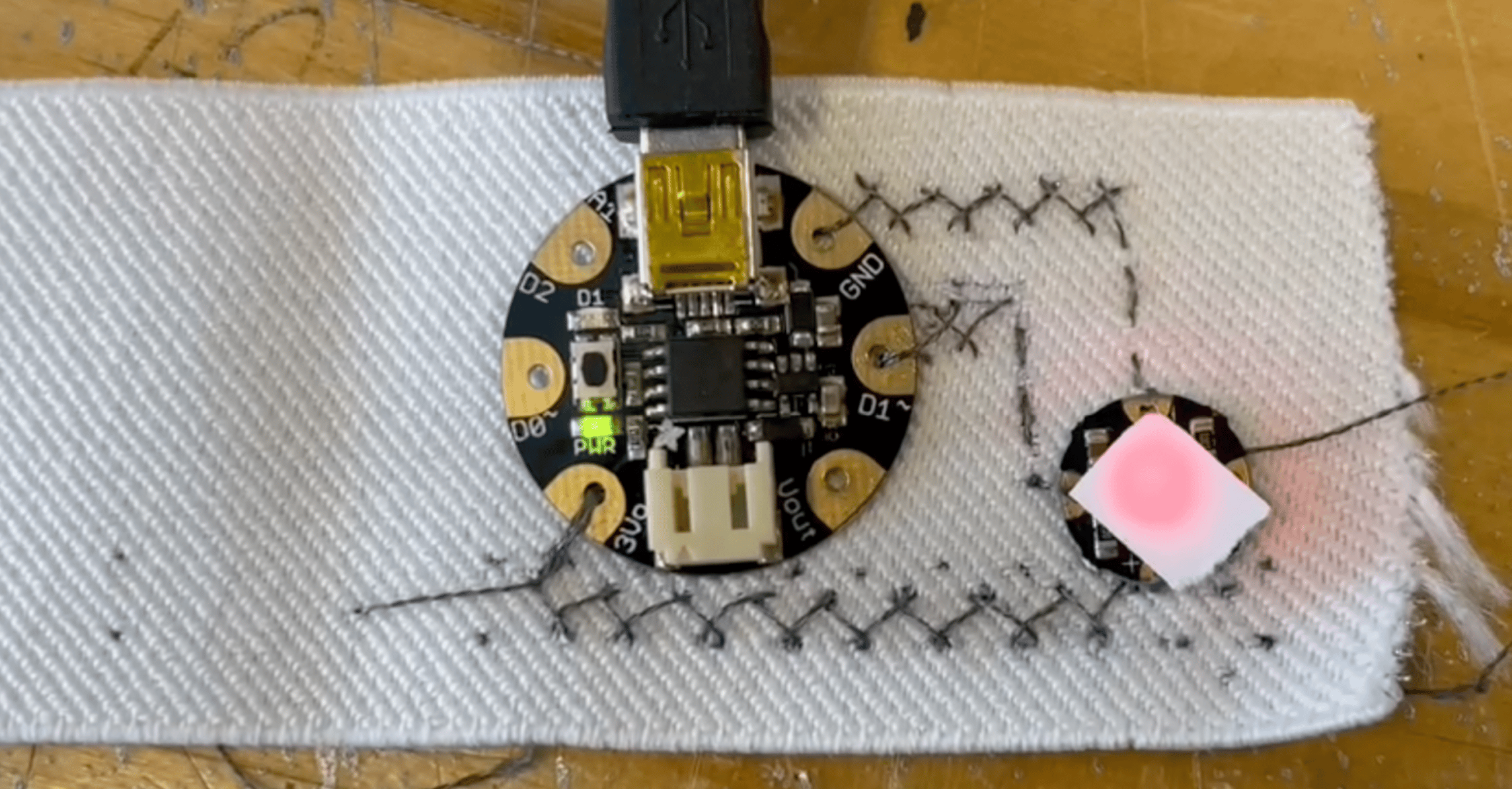
Test circuit on stretch fabric with Adafruit Gemma, Neopixel LED, and conductive thread

Zig-zag stitch allows for stretch!


Machine-sewn circuit on belt prototype -- super stretchy!
Prototyping + Testing
What form factor is the most effective?
haptic belt ✅

99% correct
1.5s reaction time
armband ❌

75% correct
4.3s reaction time
Although the armband was considered more discreet, participants reacted far slower when using the armband, and their accuracy was far worse. Participants also indicated that their mental load was much higher.
“With the armband, I have to put a lot more mental effort into interpreting what it’s trying to indicate to me.”
Prototyping + Testing
Which haptic signalling strategy can users interpret most accurately?
I tested three signalling strategies with 8 participants. They were blindfolded, and the order each strategy was tested in was varied for each participant to mitigate learning/acclimation biases.
Haptic signalling strategies



84% correct within 90°
2.3s reaction time
8 directions
8 motors
75% correct within 90°
4.2s reaction time
8 directions
4 motors
99% correct
1.5s reaction time
4 directions
4 motors
I also asked them qualitative questions about each strategy to see which ones participants subjectively preferred.
“For me, 4 directions was enough to give me a general idea of where to look.”
“It was difficult to parse when multiple motors were vibrating. I felt overwhelmed.”
We decided to continue with 4 directions and 4 motors.
Prototyping + Testing
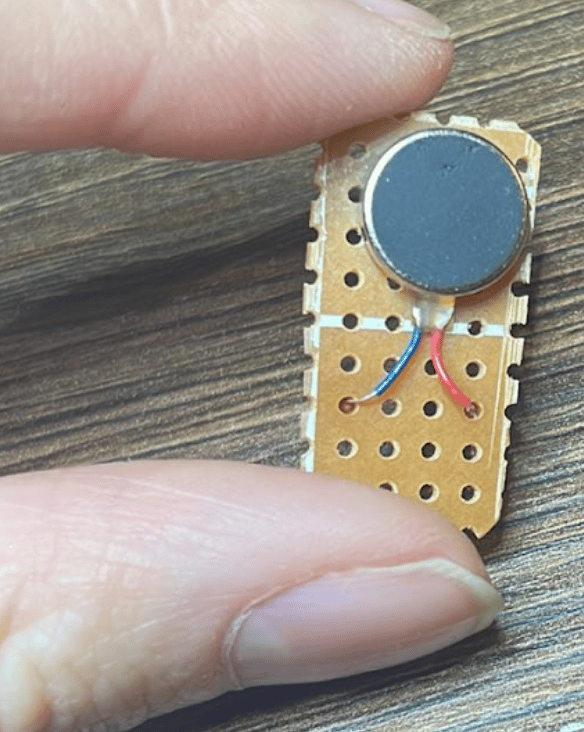
How can the haptics be made more durable for regular use?
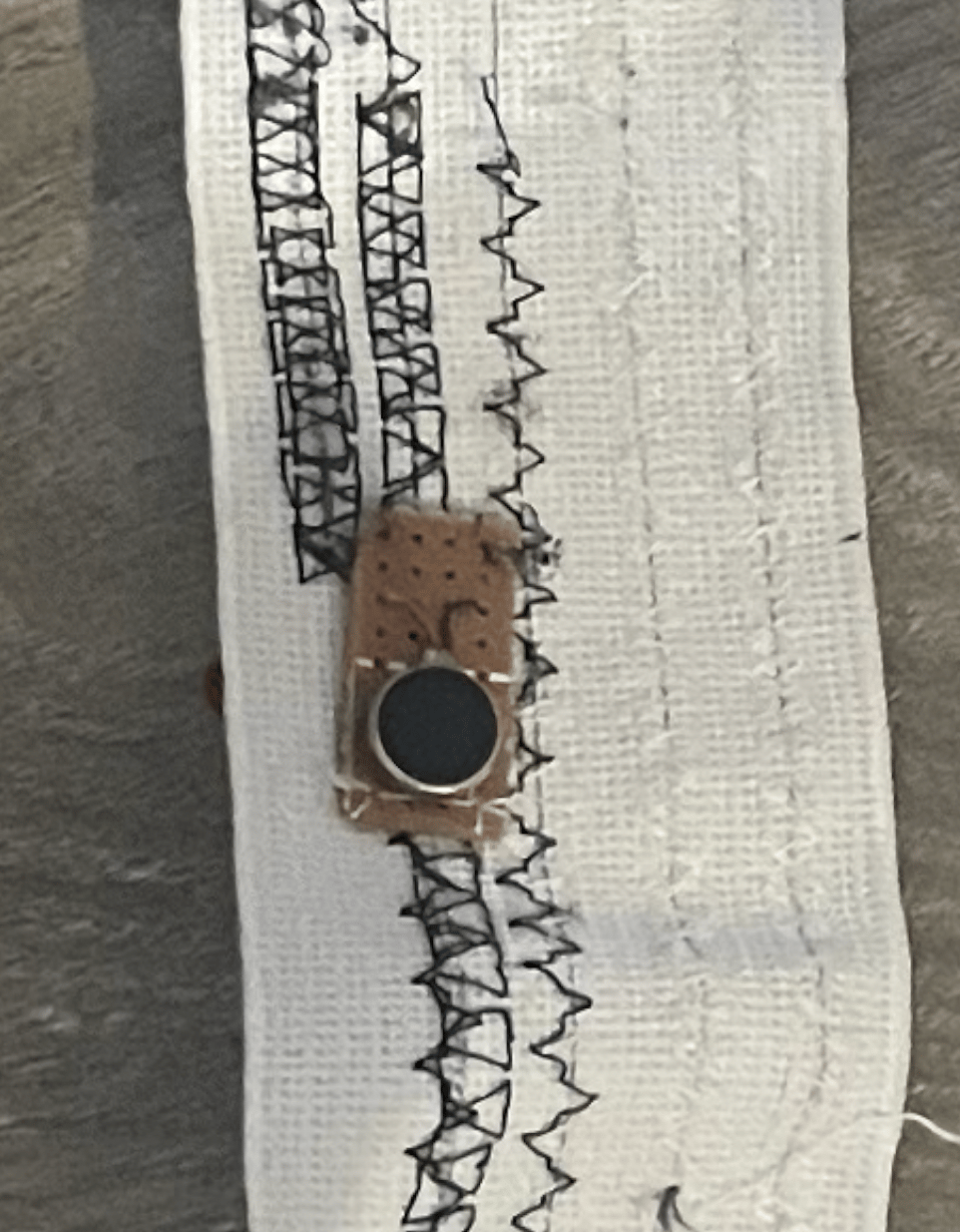
Problem 1: The haptic motors kept breaking during testing, especially when stretched.
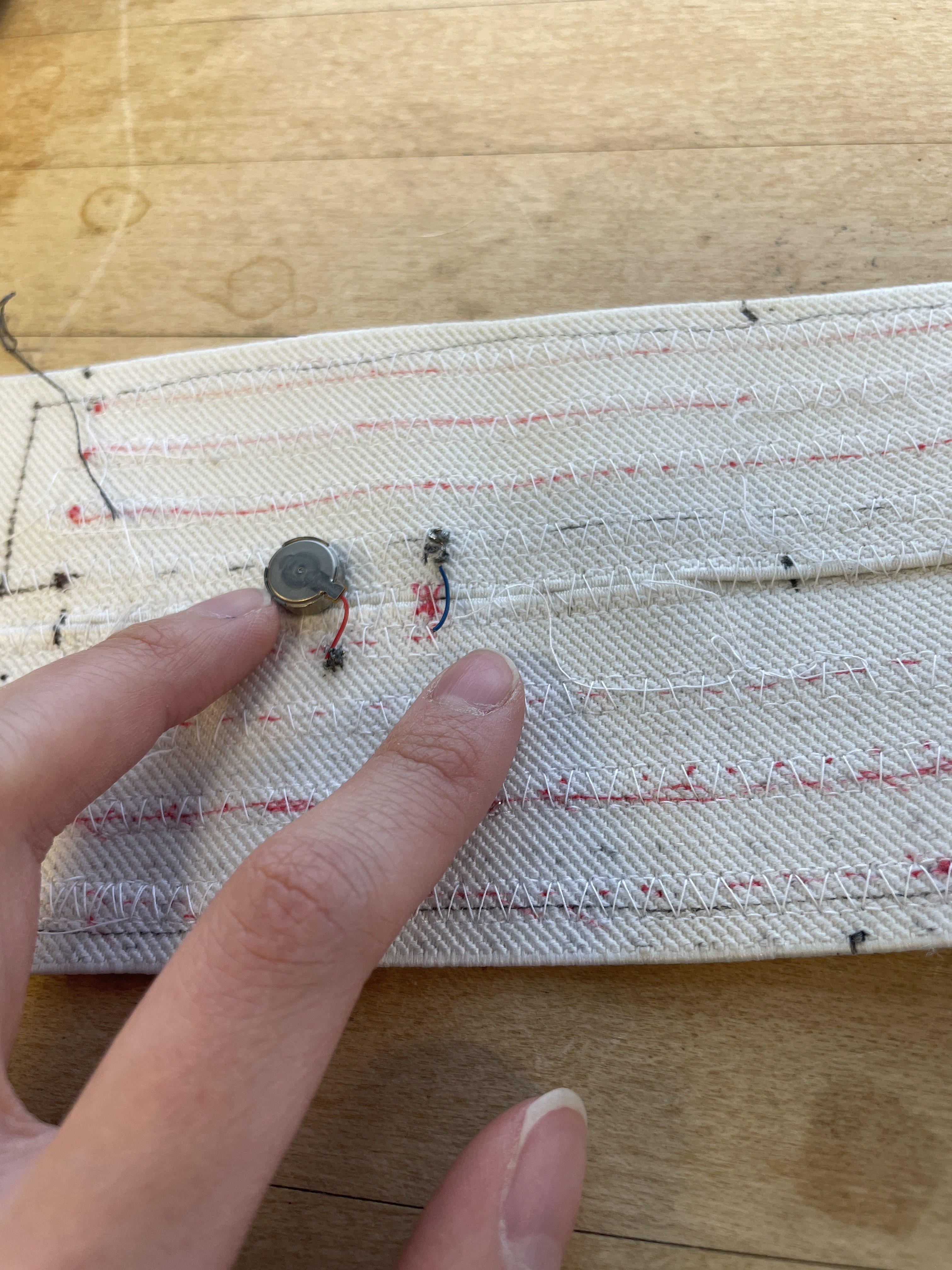
Solution: I soldered motors onto a piece of protoboard, and used the protoboard holes to attach the assembly onto the belt.
Problem 2: Vibrations were very weak due to low current output.
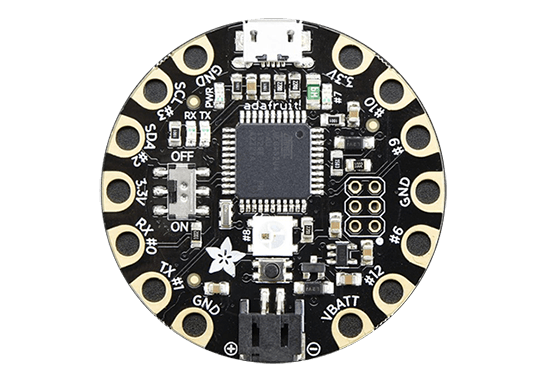

Adafruit Flora + Arduino Uno
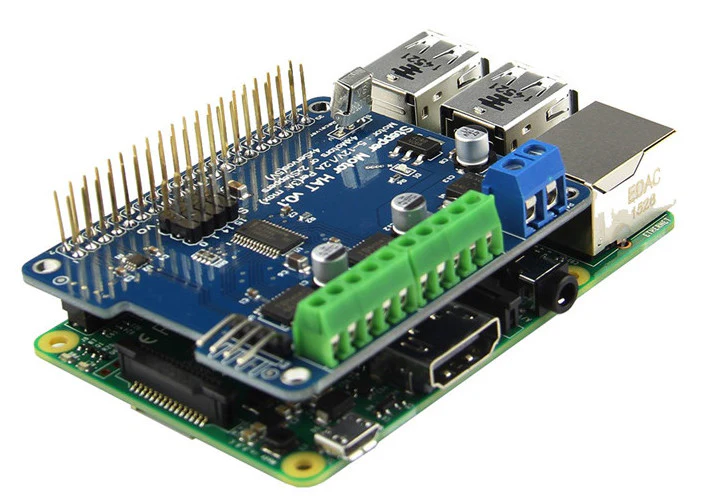
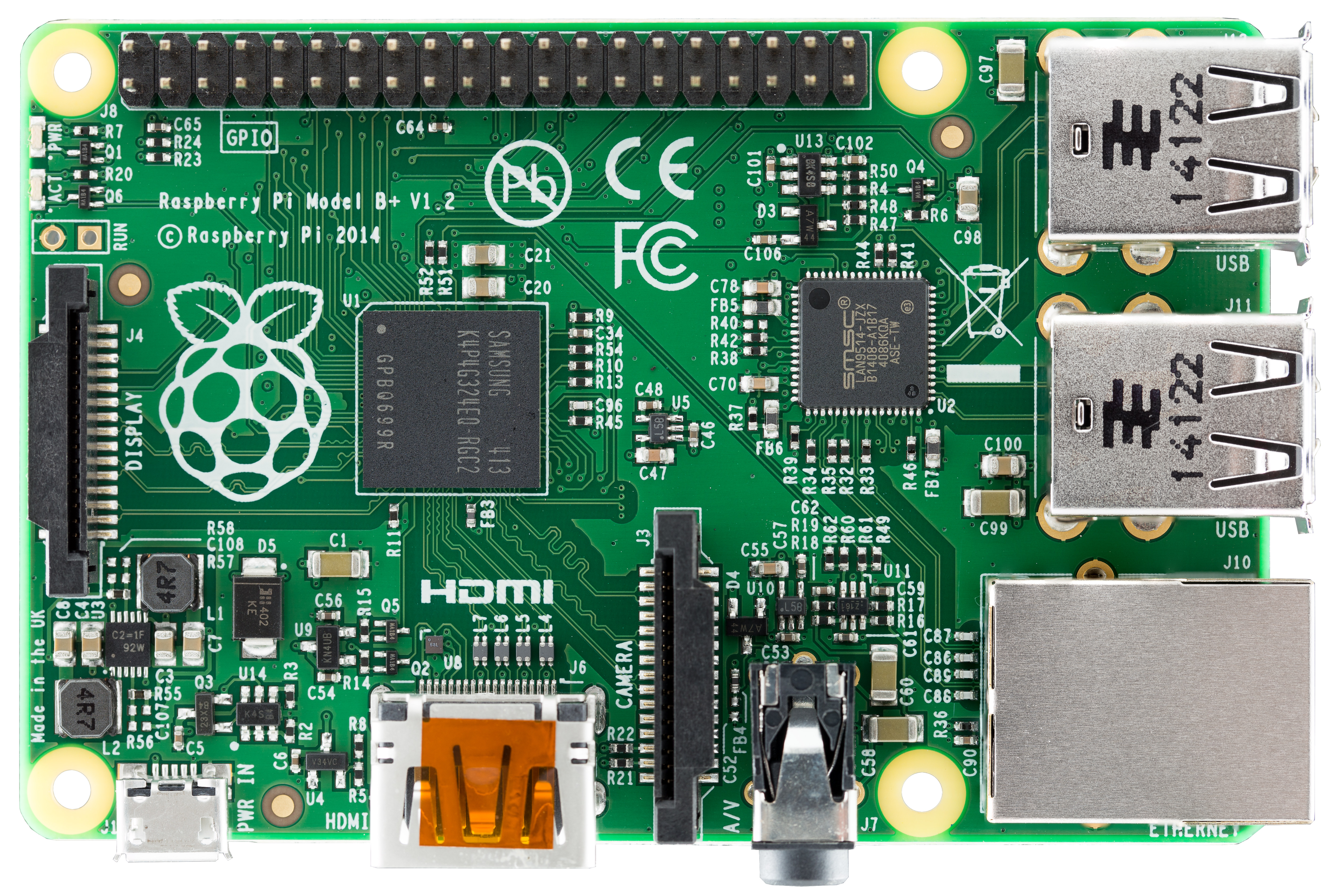
Raspberry Pi
Solution: Raspberry Pi +
Motor Driver Hat
GPIO output: <20mA

GPIO output: 16mA
Motor Driver Hat output:
Up to 1.2A (!)


Finished System
How effective was the final prototype?

First iteration
57% correct
4.6s reaction time
→
Final iteration
100% correct
0.15s reaction time
Accuracy went up to 100%
Reaction time decreased by 97%

And we won Best Overall Capstone Project!!
Next steps
What could be improved?
Longer-term wear testing:
We validated accuracy and reaction time, but never tested comfort and usability over hours or days of real use. This is where the real wearability issues would surface. We also never revisited the armband, and whether accuracy rates and reaction time would have improved with more practice.
More polish as a consumer product:
The belt works, but it's still visibly a prototype. I want to explore integrating the electronics into everyday clothing, such as in a jacket lining, an armband, a waistband. One of the important things that came out of our user research was discreetness, and ensuring our design doesn't read as assistive tech unless the wearer wants it to.
Reflections
What did I learn?
Prototype early and quickly:
Having a tight loop between prototyping and testing was essential to the success of this project. We started out with a pretty vaguely defined idea of the form factor. Through prototyping and testing, we learned a lot about design, material, and human constraints. For example, we learned that using leather makes the resulting belt stiff, and the haptics difficult to interpret. As a result, we were able to pivot quickly to using electronic textiles.
Simpler is often better:
We started with 8 directions and 8 motors because more precision seemed better. Testing showed that 4 directions and 4 motors hit 99% accuracy with a 1.5s reaction time. Participants found more motors overwhelming, not helpful. The "less sophisticated" version was the better design. I keep coming back to this when I'm tempted to over-engineer.